




芯片资讯
热点资讯
- FPGA图像处理-CLAHE算法的第二步对比度限制(三)
- 河东科技发布基于24GHz毫米波雷达的多合一人体存在传感器
- 可变增益放大器AD8367的特性及使用优势
- FPGA模拟MIPI相机接入Jetson方案
- ADUM1201隔离芯片能否实现双向传输?ADI工程师告诉你
- 紫光同芯发布国内首个一站式 eSIM 解决方案既提供高性能的芯片硬件,还符合 GSMA 的规范操作系统
- 韩国科技企业遭遇疫情多重打击:越南工厂也没逃过
- 基于DSP器件TMS320VC5509A芯片实现SAW RFID系统的设计
- 电子电路元器件套装与原理图解析:芯片分销商模式如何赋能电子设计
- 基于非接触距离与接触压力的柔性电容传感器
- 发布日期:2024-01-16 08:06 点击次数:209
人机交互已被广泛应用于机器人控制和增强现实/虚拟现实等多个领域。然而,目前的人机交互主要基于单一交互模式,需要佩戴笨重的设备或与界面保持物理接触,导致交互效率和智能化程度有限。基于以上情况,浙江大学机械306实验室刘玮杰博士生提出了一种新型柔性双模式电容传感器,可实现非接触距离与接触压力的复合传感,并应用到人机交互接口中实现了无触摸与触摸双模式人机交互。相关成果发表在Advanced Materials Technologies期刊上,题为“A Flexible Dual-Mode Capacitive Sensor for Highly Sensitive Touchless and Tactile Sensing in Human-Machine Interactions”。论文研究工作得到了国家自然科学基金、中央高校基础研究基金等项目的资助。
该传感器的结构如图1所示,它由三层组成:顶层和底层是带有迷宫式铜电极的PET,顶层和底层电极之间夹着一层硅橡胶电介质层,具有多孔-截断金字塔双层微结构。传感器分为12个传感单元,每个传感器单元由一对互补的迷宫电极和一个多孔-截顶金字塔分层电介质组成。通过将电极设计成方形迷宫结构加强边缘电场,从而提高近距离感知性能。多孔-截断金字塔分层电介质层的设计旨在通过分层变形来改善硅橡胶的变形能力,从而提高压力传感性能。
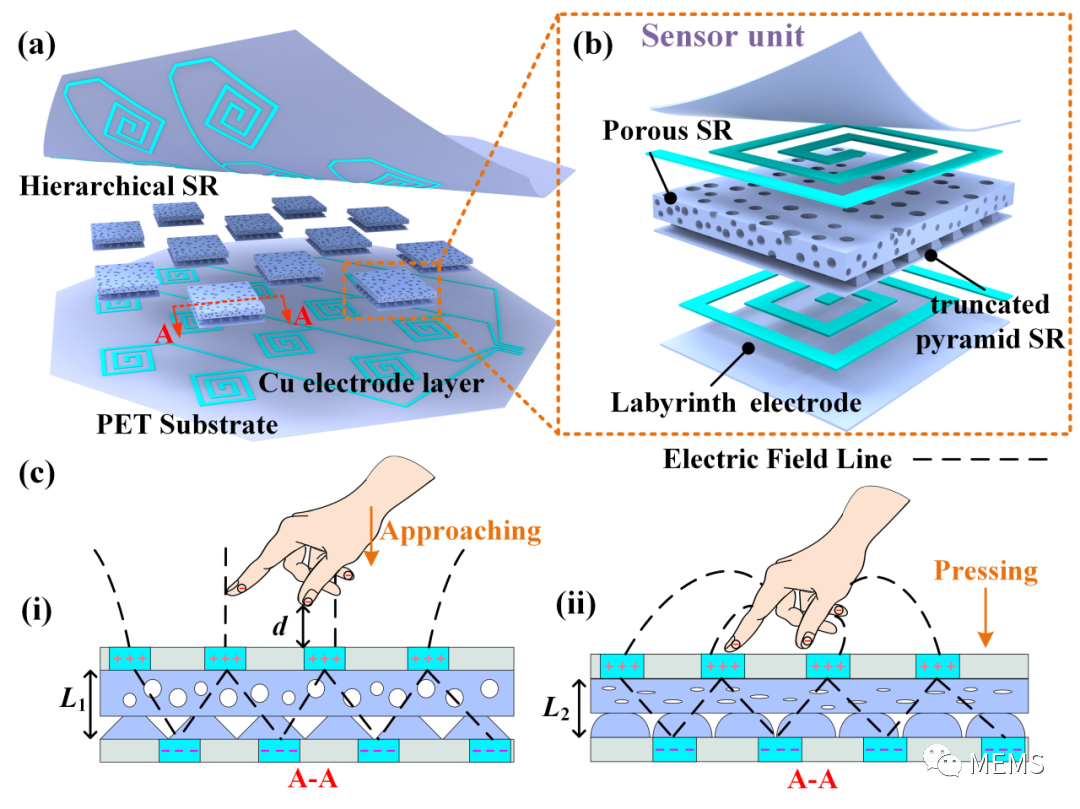
图1 柔性双模电容传感器的结构示意图
接近传感的原理为:上下电极构成一个电容双极板,当外部物体尚未接触传感器时,传感器通过电极激发的边缘电场检测外部物体的接近。当外部物体接近时,传感器激发的边缘电场会减弱。对于导电物体,原始边缘电场的减弱主要归因于静电感应产生的感应电荷,绝缘物体则主要通过极化效应削弱边缘电场。压力传感的原理为:当物体开始对传感器施加压力时,介电层开始变形,传感器内部的电场将发生变化。如图2(d)所示,在低压范围内,由于杨氏模量较低,多孔结构会迅速变形。内部孔隙受到挤压,上下电极之间的距离减小,同时介电层的介电常数也会因空气受到挤压而增大。这两者都会使传感器的电容增大。由于多孔结构的应力分散,截顶金字塔形结构在这一阶段的变形不明显。因此,电容的变化主要是由多孔结构的变形造成的。在高压范围内,内部孔隙被充分压缩, 芯片采购平台多孔结构可以看作是一个向下的固体,进一步挤压截顶金字塔形结构。截顶金字塔形结构的变形导致上下电极之间的距离缩短,从而使电容继续增加。
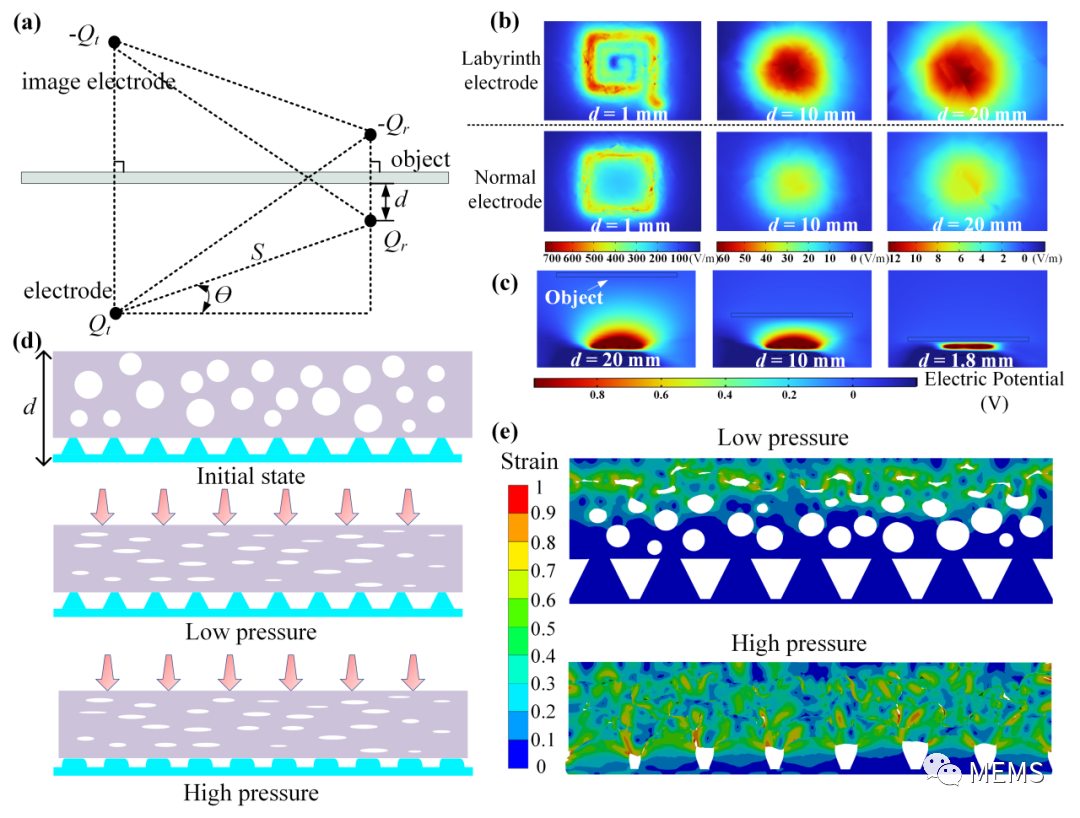
图2 柔性双模电容传感器的工作原理与仿真分析
所提出的双模传感器具有很高的传感性能,对人手的非接触距离检测范围可达110mm,对不同接近速度的物体也能很好的区别检测,且具备良好的信号稳定性。压力检测范围为0至200kPa,具有两段线性灵敏度,最大灵敏度为0.464% kPa⁻¹。此外,该传感器还能有效区分近距离信号和触觉信号,并具有出色的信号稳定性、可重复性和准确识别手势动作的能力。
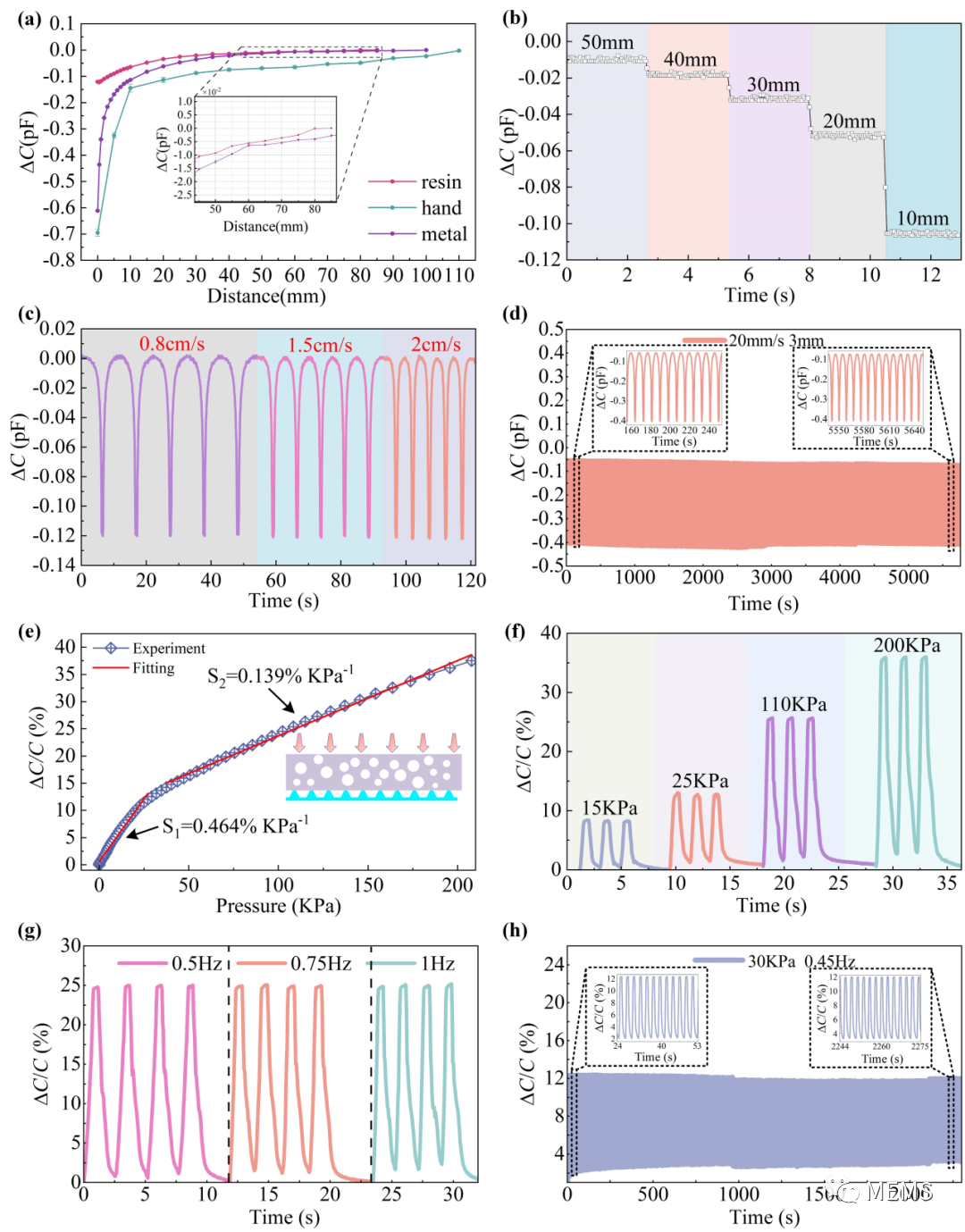
图3 柔性双模电容传感器的性能测试结果
为了验证我们开发的双模传感器在人机交互中的潜在应用,我们进行了机器人交互实验。如图4(a)和图4(b)所示,我们搭建了一个人机交互平台。传感器通过FPC连接到采集电路。MCU通过控制模拟开关选择传感器单元。选定传感器单元的行电极和列电极随后连接到AD7153 CDC芯片,该芯片通过在方波激励期间连续采样通过传感器的电荷来收集电容数据。然后通过USB将数据传输到控制机械臂的计算机,计算机根据收集到的数据识别交互动作,然后通过 RS232将控制命令传输给机械臂和机械手。
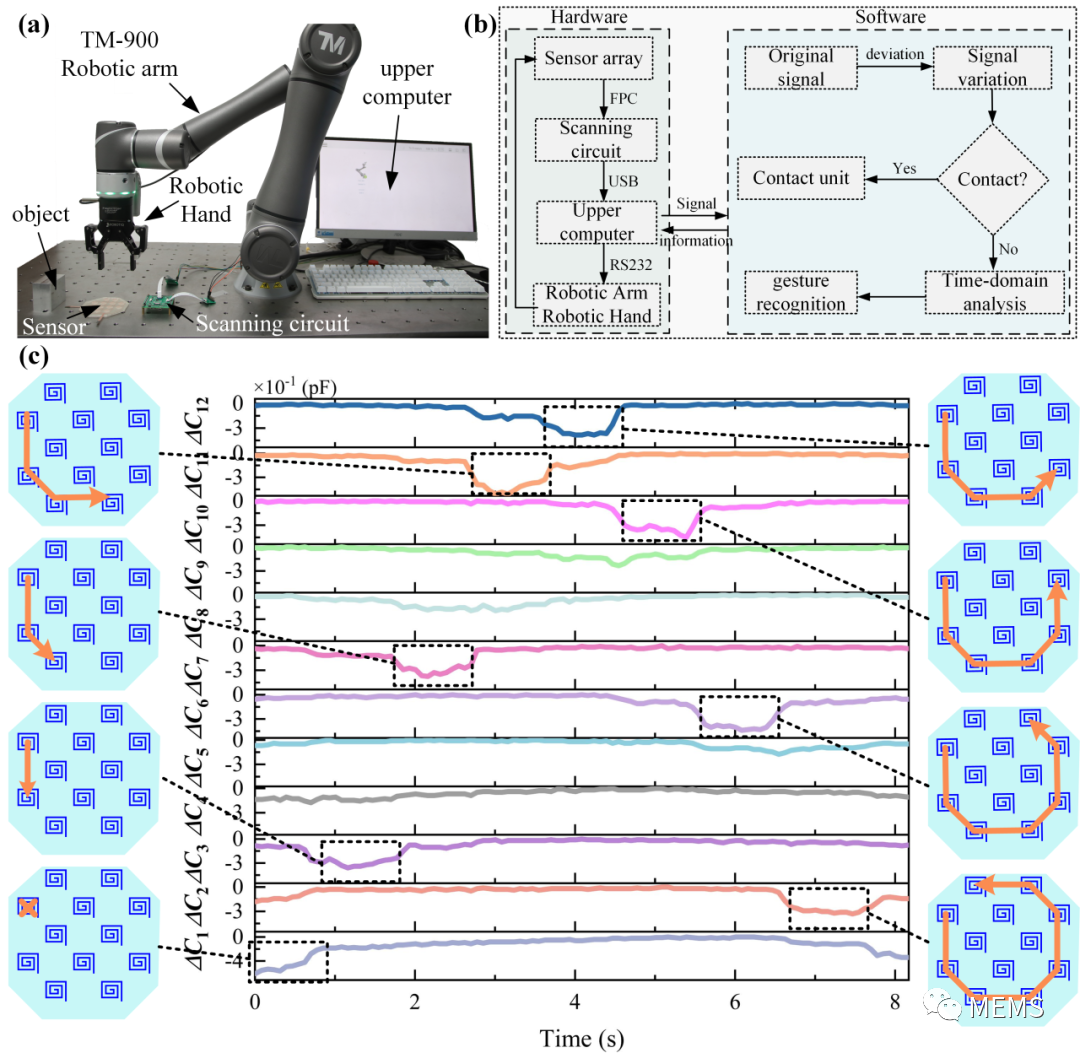
图4 双模式人机交互系统搭建示意图
如图5所示,手指在传感器上方依次经过传感器单元1-单元4-单元8-单元11,在时域中得到相应的序列--单元1减小0.38pF,单元4减小0.31pF,单元8减小0.39pF,单元11减小0.45pF。机械臂能实时接收绕Y轴逆时针旋转的运动指令并完成操作。除了非接触式交互,传感器还能很好地实现接触式交互,手指与不同的传感器单元接触,可依次实现机械手的抓取和释放,以及机械臂在Z轴上的下降。传感器还能连续实现一系列动作的感知,并能在非接触式和接触式交互之间无缝切换。
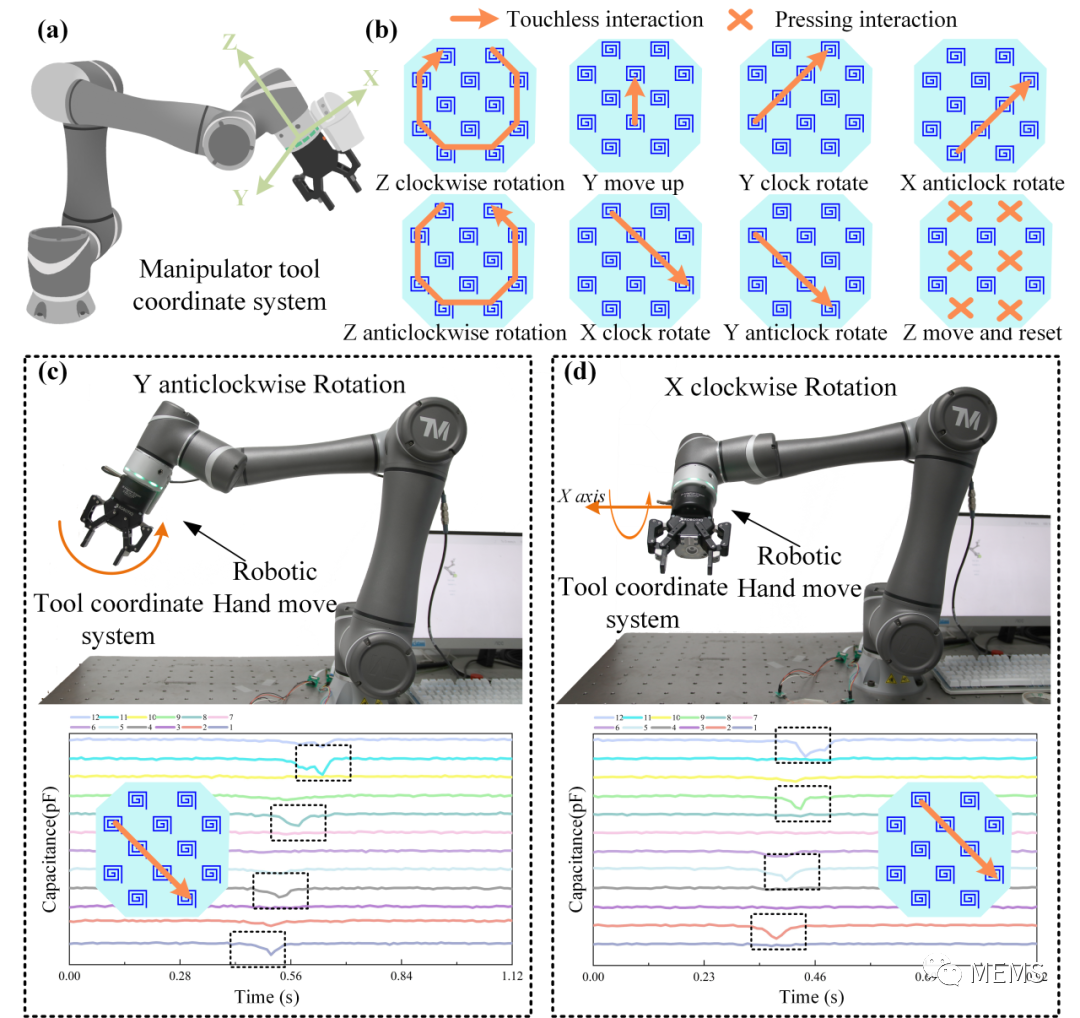
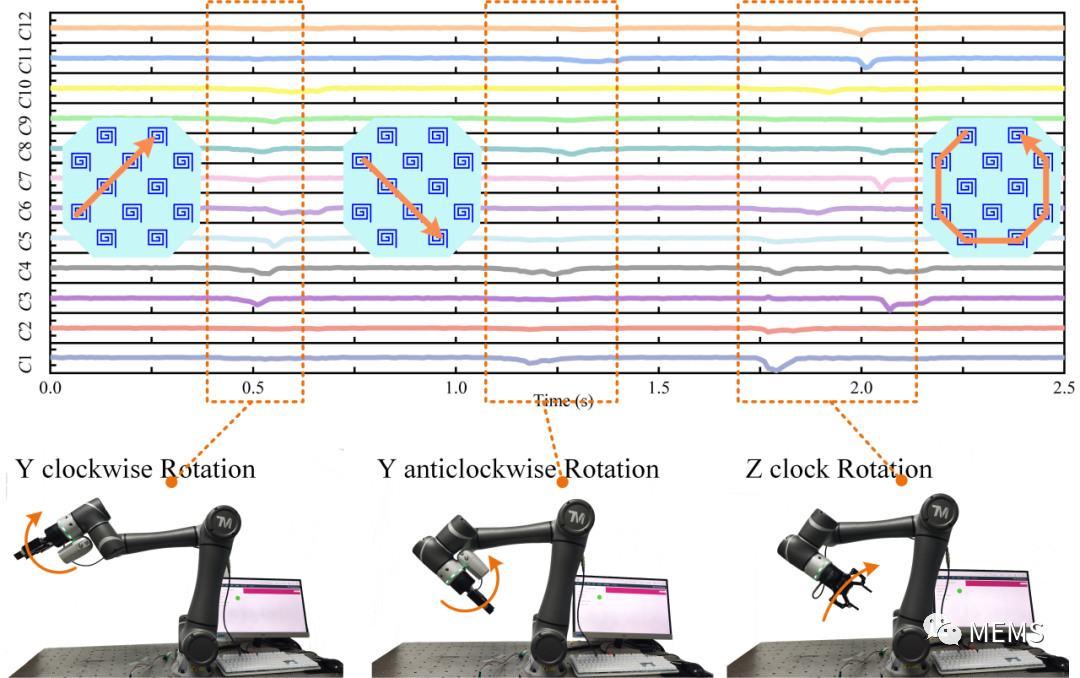
图5 非接触-接触双模式人机交互示意图
该传感器的卓越性能不仅推动了智能人机交互技术的发展,而且凸显了其在未来人机界面应用中的巨大潜力。通过无缝、准确地检测非触摸和触觉输入,该传感器可增强用户的控制能力和直观的交互体验。将这种传感器集成到各种交互系统中大有可为,将为人机交互领域带来新的机遇。
审核编辑:黄飞
- 基于MAX7348的串行I2C总线的键盘电路设计2024-11-25
- 基于ADPD188BI集成光学模块系统2024-10-14
- 基于DSP器件TMS320VC5509A芯片实现SAW RFID系统的设计2024-10-04
- 联想将基于英伟达新一代芯片自主研发车载域控制器平台2024-05-10
- 基于Crazyflie和TOF传感器的自旋停效果实现2024-01-26
- 河东科技发布基于24GHz毫米波雷达的多合一人体存在传感器2024-01-20